How does the control system in robotics work?

The Basics of Robotic Control System
Every beginner needs to understand what is robotic control and how do Robots work. In this article, I have explained the control system in robotics which helps to control the movements of robots that carry out a wide range of activities with speed and precision to aid humans.
Today there is countless application of robotics in areas such as material handling, transporting heavy things, automated manufacturing processes, self-driving cars, health care applications, and many more. In fact, robots are becoming a vital presence across industries, from automotive factories and advanced manufacturing lines to pharmaceutical labs and even operating rooms. The global robotics market is booming, with its value in the USA alone estimated at over $43 billion and projected to reach nearly $71 billion by 2028.
This rapid growth is driven in part by advances in robotic control systems, which now allow robots to perform tasks with incredible dexterity and precision. For example, the integration of high-precision force and torque sensors means robots are no longer limited to repetitive, rigid motions—they can now adapt to delicate assembly jobs, handle force-sensitive operations, and manipulate objects with a human-like touch. These innovations have opened doors to new possibilities, from surgical robots performing intricate procedures to collaborative robots (cobots) working safely alongside people on the factory floor, and even to quality control tasks where precision is absolutely critical.
The robotic control for controlling movements of robots can be done in various ways which include manual control, wireless control, and fully automatic control using Artificial Intelligence to have the robot move on its own. Automation plays an integral part and vital role in Robotics operations. With technological advancements, the robotic control system continues to develop and advance.
Before I go to explain the robot control system let’s first see how do robots work.
You may also like to read: Important Facts about Artificial Intelligence
How do robots work?
A robot is an autonomous machine that has the following 3 main parts. All of these parts work together and explain how do robots work.
1. Controller – The robot controller is a feedback control system, run by a computer program that gives commands for the moving parts of the robot to follow. The controller stores information about the robot and its work environment and contains programs that operate the robot; it acts as the brain, orchestrating all movements and functions according to its instructions.
Beyond just issuing commands, a modern robot controller relies on sophisticated software to bring together all the moving pieces. This includes:
- Real-time operating systems (RTOS): These systems ensure that tasks are scheduled efficiently and resources are managed so the robot can respond quickly to sensor input and changes in its environment.
- User interfaces: These allow humans to interact with the robot—monitoring its performance, adjusting settings, or issuing manual commands when needed.
- Middleware: This layer connects the various software components, enabling seamless communication and data exchange between the robot’s sensors, actuators, and central processor.
Together, these software elements integrate with the hardware to make the robot a fully functional, autonomous system capable of adapting to its tasks and surroundings.
2. Actuator – The Actuators (such as motors, pistons, grippers, wheels, and gears) are used to produce mechanical movements of the robot elements to make the robot move, grab, turn, or lift. The source of energy that the actuators require to create motion is usually electricity, hydraulic fluid, or pneumatic pressure;
3. Sensors – The sensors give the robots an awareness of their environment or surroundings and other important information. The sensing elements feed measurements and details like sizes, shapes, space between objects, direction, etc. to the robot controller which processes them and then sends back the control signal making necessary changes, to activate the actuators to enable appropriate robot control.
Sensors are essentially the eyes and ears of a robot, gathering data from the environment that translates into actionable details. There are many types of sensors, each suited for different tasks. For example, camera sensors allow robots to map their surroundings, helping them navigate and avoid obstacles, while microphone sensors pick up sounds, enabling robots to respond to audio cues. Advanced sensors, such as tilt sensors, can even measure the slant or orientation of a robot with respect to a horizontal plane, which is crucial for tasks requiring balance or detecting inclination. This wide array of sensors ensures that robots can adapt to complex and changing environments, making them more versatile and effective in accomplishing their programmed tasks.
Advancements in Force Torque Sensor Technology and their impact on Robotic Control
Modern robotics has benefited enormously from innovations in force torque sensor technology. These sensors play a crucial role in improving how robots “feel” and respond to their environment, much like giving a robot an enhanced sense of touch. With high-precision force torque sensors, robots are now capable of detecting even the smallest changes in force and torque as they interact with different objects or perform tasks.
So, what does this mean for robotic control systems? For starters, these sensors enable robots to perform tasks that demand delicate handling—think of assembling intricate electronic components, conducting precise quality inspections in manufacturing, or even assisting in complex surgeries where gentle movements are essential. The feedback provided by force torque sensors allows the robot’s controller to make real-time adjustments to its movements and grips, ensuring both safety and precision.
Some well-known sensor technologies used in these applications, such as those found in products by leaders like ATI Industrial Automation and OnRobot, have helped propel advancements in collaborative robotics (cobots). Here, robots can safely share workspace with humans, automatically sensing unplanned contact and adapting their actions to prevent injury or damage.
In essence, force torque sensors are a key puzzle piece in achieving smarter, safer, and more adaptive robots. As sensor accuracy and integration capabilities improve, robots are becoming more autonomous and efficient—opening up new opportunities for automation across industries.
Robotic Control system explained
The Robotic control system manages commands and directs, or regulates the movement and function of various parts of the robot to achieve the desired result. The essential requirement of any robotic control installation is automatic control of robot motion. Every robot has a controller which is a type of feedback control system. It continuously reads from sensors and updates the commands for the actuators so as to achieve the desired robot behavior. The robot controller coordinates and controls all aspects of the operation of the robot. Now let’s see how the robotic control system works.
In order to achieve high levels of performance, the robotics control uses a closed-loop control system making use of sensor feedback as explained below.
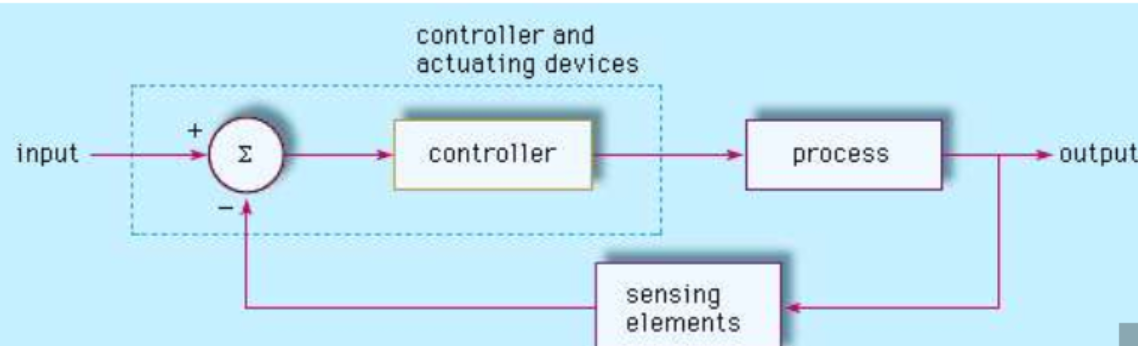
A feedback control system consists of five basic components which are,
1. Input;
2. Process being controlled;
3. Output;
4. Sensing elements;
5. Controller and actuating devices;
Main Types of industrial control systems in Robotics
To better understand how robots carry out their complex tasks seamlessly, it’s helpful to look at the key types of industrial control systems that enable these operations. Each system plays a pivotal role in coordinating and streamlining robot functions within various settings, from manufacturing floors to smart buildings.
- Programmable Logic Controllers (PLCs): PLCs serve as the “nervous system” for many industrial robots, overseeing inputs from sensors and issuing instructions to actuators based on programmed logic. These controllers are especially well-suited for automating repetitive tasks and ensuring consistency in processes like assembly lines and packaging.
- Distributed Control Systems (DCS): Unlike PLCs, which typically manage isolated processes, DCS are tailored for more complex, continuous operations such as chemical manufacturing or oil refineries. In these environments, a DCS orchestrates a network of controllers to maintain optimal process conditions and smooth coordination among multiple robotic subsystems.
- Human-Machine Interfaces (HMI): HMIs provide a visual and interactive bridge between operators and robotic systems. Through these control panels or touchscreens, human supervisors can monitor real-time data, tweak robot performance, and quickly respond to system alerts. Think of them as the “dashboard” that keeps everything in check.
- Building Management Systems (BMS): In facilities where robotics are part of broader automation—like hospitals, office towers, or research labs—a BMS oversees multiple systems, including lighting, climate control, security, and of course, robotics. This integrated approach optimizes building efficiency and ensures all automated operations work in harmony.
These core industrial control systems each bring a unique set of capabilities to the table, laying the foundation for everything from the fastest factory robot arms to smart service robots in modern buildings.
What is a reactive control system and what are its benefits and disadvantages?
A reactive control system is one where the robot’s actions are directly determined by real-time sensor inputs, without relying on internal models or memory of previous actions. Essentially, the robot “reacts” instantly to its environment—just like your hand reflexively pulling away from a hot stove. This control approach is especially useful for tasks that demand rapid response, such as avoiding obstacles or swiftly adjusting to unpredictable changes in the surroundings.
Reactive control systems are frequently employed in robots that operate in dynamic or unstructured environments. For instance, warehouse robots navigating around moving boxes, or inspection robots responding to falling debris, rely heavily on this type of control to function efficiently.
Key advantages of reactive control systems include:
- Immediate response: Since actions are triggered directly by sensor feedback, the robot can react very quickly to changes and sudden events.
- Adaptability: They handle unexpected situations well, making them ideal for environments where unpredictability is common.
There are also some notable drawbacks:
- Limited decision-making: Reactive systems can’t perform complex reasoning or long-term planning, as they focus only on the present inputs rather than any future outcomes.
- No memory or foresight: Without an internal model or ability to recall past events, these robots are not suitable for tasks that require strategic thinking or planning ahead.
Understanding reactive control gives us insight into how robots make split-second decisions, but it also shows the trade-offs when compared with more advanced or “intelligent” forms of robot control.
Differences Between PLCs, DCS, HMIs, and BMS
While exploring robotic control systems, it’s important to understand the various technologies that play unique roles in automating and managing modern industrial and building environments. Here’s a quick look at how some of these systems differ:
- Programmable Logic Controllers (PLCs): Think of PLCs as the fast, dependable switchboard operators of the automation world. They excel at monitoring sensors and actuators, responding to real-time inputs, and managing discrete, step-by-step processes—like controlling a conveyor belt or robotic arm on an assembly line. Their main strength lies in speed and reliability for repetitive, well-defined tasks.
- Distributed Control Systems (DCS): Unlike PLCs, DCS are tailor-made for managing large, continuous, and complex industrial processes—such as those found in oil refineries or chemical manufacturing plants. DCS provide centralized control and oversight, allowing for fine-tuned adjustments and seamless integration across sprawling operations, ensuring everything stays balanced and under control.
- Human-Machine Interfaces (HMIs): HMIs act as the bridge between humans and the robot or process being automated. Through visual displays, buttons, and dashboards, HMIs allow operators to monitor system performance, send commands, and receive feedback in real time. They make sophisticated automation accessible and user-friendly, without the need to write code or tinker with hardware.
- Building Management Systems (BMS): BMS takes automation beyond factories and into our everyday buildings—hospitals, office towers, and even shopping malls. These systems coordinate lighting, heating and cooling (HVAC), security, and more, ensuring comfort, safety, and energy efficiency throughout large facilities.
Each of these systems has a distinct focus, but together, they form the backbone of automated control in both industrial and commercial spaces.
What is a closed-loop robotic control system?
A control system that makes use of feedback is called a closed-loop control system. In closed-loop feedback control, the controller compares a measured output value of a process with the desired set value which is the reference or set point.
The output value is fed back through the ‘sensing elements’ for comparison with the reference value. The difference between the actual output value and the desired set value of the process is the ‘error’ signal. This error signal is fed into the controller which generates a control action making necessary changes in the input signal to the ‘process’ under control so that the output value of the process gets to the desired set value.
The concept of a closed-loop robotic control system can be diagrammatically represented as below:
The robot controller which controls the robot’s movements can be considered the Robot’s brain. The basic theory related to the robotic control system is that an input signal is generated in response to a program command for achieving a specific goal, which produces an output signal from the controller that activates an actuator to produce mechanical movements of the robot elements.
The smarter the programming of the control algorithm, the more reliable and efficient the control system. The robot’s motion and forces are measured by ‘sensors’ that send the measurements back to the robot controller. Using the reference set point and the sensor feedback the robot controller makes changes that are required in the control signal to reduce the system error and bring the output of the system back to the desired set value.
Advantages and Disadvantages of Closed-Loop Control
Closed-loop control systems are widely used in robotics due to their ability to provide accurate and adaptive behavior—qualities crucial for dynamic or unpredictable environments, such as those encountered by autonomous vehicles or industrial robots. For example, self-driving cars rely on cameras and radar sensors to gather real-time data about their surroundings, constantly adjusting their actions to follow the intended path safely.
At their core, closed-loop systems act as the “brains” of robotic operations, seamlessly integrating sensors, actuators, controllers, and sophisticated software. This integration enables robots to process feedback and make split-second decisions in real time, a necessity in applications ranging from manufacturing assembly lines to autonomous drones navigating complex terrain. The combination of continuous data collection and responsive control is what allows modern robots to execute intricate tasks with remarkable precision.
Pros:
- Capable of delivering precise and consistent performance.
- Able to handle complex and changing tasks or environments by adjusting in real time.
- More robust to disturbances and uncertainties compared to open-loop systems.
Cons:
- More complex to design and implement, often requiring sophisticated algorithms and robust programming.
- Dependence on additional sensors and hardware increases cost and system complexity.
- Potential for greater maintenance needs due to reliance on multiple components working seamlessly together.
Overall, while closed-loop control systems introduce additional complexity, their ability to self-correct and adapt makes them indispensable in modern robotics, especially as tasks and environments become more challenging and dynamic.
What is an open-loop control system, and what are its advantages and disadvantages?
An open-loop control system in robotics is a type of system that operates based on pre-set instructions without receiving any feedback from the environment. Unlike closed-loop systems, which adjust actions in response to real-time information from sensors, open-loop controllers simply execute commands as programmed, assuming everything proceeds according to plan.
For example, imagine a basic conveyor belt on a factory line or an automated lawn sprinkler system. These devices act according to a fixed schedule or instruction, regardless of changing conditions. The sprinkler doesn’t know if it’s raining outside or if some areas are already saturated—it just follows its timing and pattern.
Pros of Open-Loop Control Systems:
- Simple design and operation, making them straightforward to set up.
- Typically less expensive than closed-loop alternatives.
- Ideal for repetitive, predictable environments where little variability is expected (think of a light timer or a basic household toaster).
Cons of Open-Loop Control Systems:
- They cannot adjust to unexpected changes in the environment since there is no sensor feedback.
- There may be a drop in accuracy or efficiency if conditions vary, leading to inconsistent results—for example, overwatering part of a lawn or missing pieces on a conveyor if something shifts.
In essence, open-loop control systems are best suited for tasks where reliability is driven by routine and predictability, rather than adaptability or precision.
What is a deliberative control system?
Deliberative control, sometimes called deliberative planning, is a type of robotic control system that focuses on high-level reasoning and detailed planning. Unlike more reactive forms of control, a deliberative control system maps out a sequence of actions in advance—often using internal models or stored knowledge about its environment—to accomplish complex or multi-step tasks.
This approach is commonly used in scenarios that require intricate decision-making and strategic foresight, such as in surgical robots assisting doctors by analyzing real-time patient data before and during operations, or autonomous planetary rovers mapping out their own exploration routes on Mars for NASA.
Strengths of Deliberative Control Systems:
- Handles complexity: These systems excel at managing sophisticated tasks that demand thorough planning and coordination of actions.
- Optimized for the long-term: Well-suited for applications that benefit from anticipating future outcomes and adapting to them, such as path planning in unknown environments.
- Effective with uncertainty: By leveraging rich information and predictive models, deliberative systems can better handle unpredictable scenarios or sudden changes.
Weaknesses of Deliberative Control Systems:
- Resource intensive: Such systems require significant computational power and detailed information about their surroundings, which can place heavy demands on hardware and software resources.
- Sensitive to planning accuracy: The effectiveness of deliberative control depends heavily on how accurately the robot can model its environment and predict outcomes, so errors in planning or gaps in environmental data can impact performance.
By weighing these factors, engineers and designers choose deliberative control for tasks where strategic thinking and goal-oriented planning are paramount, even as they balance the system’s requirements for detailed knowledge and computational overhead.
Frequently asked questions
Now that I have explained the closed-loop control system in robotics and how do robots work let me also reply to some of the questions related to robotic control often asked by people.
What are the major types of robotics control?
There are two basic control systems of robots:
1. Point-to-point control system of the robot: With this control system the robot can know the point where to pick up a part and the point where to release that part. This system works while loading and unloading applications;
2. Continuous path control system of a robot: This control system is used for jobs when the robot is required to follow a specific path, such as in welding or painting;
How can we control robots?
Robots can be controlled in various ways which include manual control, wireless control, and fully automatic control using Artificial Intelligence.
What is the difference between Robotics and Robots
Robotics is a branch of technology that deals with physical robots whereas Robots are programmable machines that carry out actions automatically or semi-automatically.
Can Machine learning in Robotics replace human employment?
Machine learning in Robotics can replace humans in many types of jobs. Factory floors are increasingly deploying robots machine learning algorithms so that they can adjust to people working alongside them.
You may also like to read this related article: Benefits of Robotic Process Automation – RPA use cases
Conclusion
In short, a robotic control system manages commands, directs, or regulates the movement and functions of various parts of the robot, as well as executes a specific set of forces and motions. In a closed-loop robot control system the actuating error signal, which is the difference between the actual output value and the desired set value of the process, is fed into the robot controller in order to reduce the error and stabilize the output of the system so as to achieve the desired robot behavior.
This post tries to give a broad and, hopefully, easy-to-understand basics of how do robots work and the fundamentals of the control system in robotics.